Device drivers represent both:
For reasons of performance and control, Operating Systems tend not to be implemented in object oriented languages (does anybody remember JavaOS?). Yet despite being implemented in simpler langauges (often C), Operating Systems, in device drivers, offer highly evolved examples of a different realization of class interfaces, derivation, and inheritance.
Whether we are talking about storage, networking, video, or human-interface, the number of available devices is huge and growing. The number and diversity of these devices creates tremendous demands for object oriented code reuse:
These needs can be satisfied by implementing the higher level functionality (associated with each general class of device) in common code that uses per-device implementations of a standard sub-class driver to operate over a particular device. This requires:
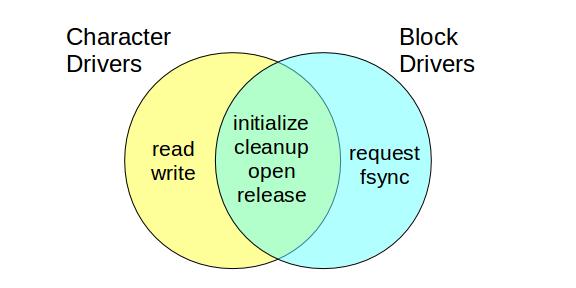
In the earliest versions of Unix, all devices were divided into two fundamental classes, which are still present in all Unix derivatives:
These are random-access devices, addressable in fixed size (e.g. 512 byte, 4K byte) blocks. Their drivers implement a request method to enqueue asynchronous DMA requests. The request descriptor included information about the desired operation (e.g. byte count, target device, disk address and in-memory buffer address) as well as completion information (how much data was transferred, error indications) and a condition variable the requestor could use to await the eventual completion of the request.
A read or write request could be issued for any number of blocks, but in most cases a large request would be broken into multiple single-block requests, each of which would be passed, block at a time, through the system buffer cache. For this reason block device drivers also implement a fsync method to flush out any buffered writes.
These devices may be sequential access, or may be byte-addressable. They support the standard synchronous read(2), write(2) and (indirectly) seek(2) operations.
For devices that supported DMA, read and write operations were expected to be done as a single (potentially very large) DMA transfer between the device and the buffers in user address space.
A key point here is that, even in the oldest Unix systems, device drivers were divided into distinct classes (implementing different interfaces) based on the needs of distinct classes of clients:
These two major classes of device were not mutually exclusive. A single driver could export both block and character interfaces. A file system would be mounted on top of the block device, while back-up and integrity-checking software might access the disk through its (potentially much more efficient) character device*. All device drivers support initialize and cleanup methods (for dynamic module loading and unloading), open and release methods (roughly corresponding to the open(2) and close(2) system calls), and an optional catch-all ioctl(2) method.
*In more contemporary systems, it is possible for a client to specify that block I/O should not be passed through the system buffer cache.
Given the fundamental importance of file systems and disks to operating systems, it is not surprising that block device drivers would have been singled out as a special sub-class in even the earliest versions of Unix. But as system functionality evolved, the operating system began to implement higher level services for other sub-classes of devices:
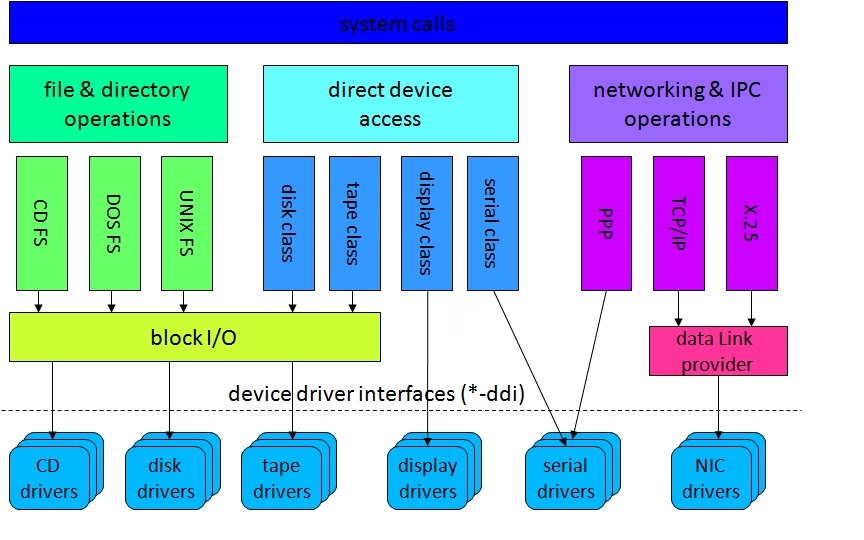
And as each of these sub-systems evolved, new device driver methods* were defined to enable more effective communication between the higher level frameworks and the lower level device drivers in each sub-class. Each of these sub-class specific interfaces is referred to as a Device Driver Interface (DDI).
*It should be noted that in some cases, the higher frameworks have been implemented in user-mode, so that some of the new interfaces have been specified as behavior rather than new methods.
The rewards for this structure are:
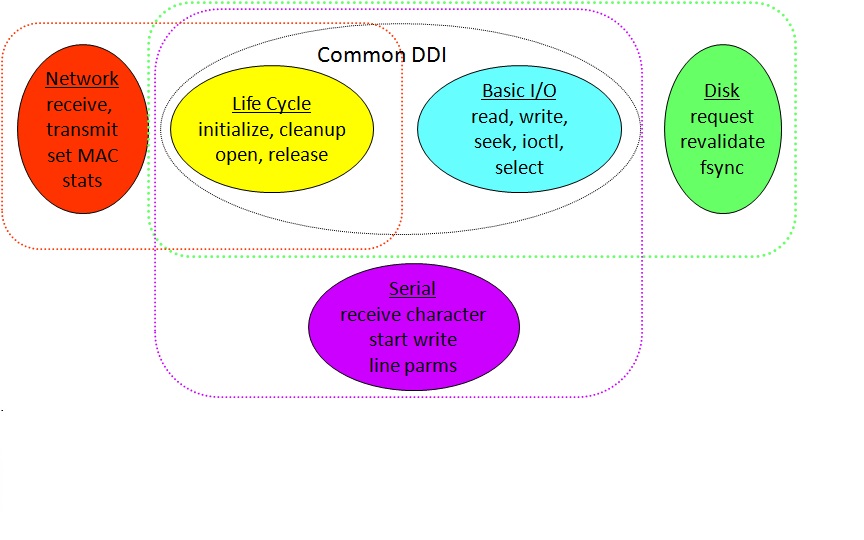
But the price for these rewards is that all device drivers must implement exactly the same interfaces:
It is nearly impossible to implement a completely self-contained device driver. Most device drivers are likely to require a range of resources and services from the operating system:
Device drivers demonstrate an evolution from a basic super-class (character devices) into an ever-expanding hierarchy of derived sub-classes. But unlike traditional class derivation, where sub-class implementations inherit most of their implemntation from their parent, we see a different sort of inheritance. While each new sub-class and instance is likely to be a new implementation, what they inherit is pre-existing higher level frameworks that do do most of their work for them.